- Follow Us
-




-

UP-13 series of photoelectric detector
With the use of gyro stabilization technology,UP-13 series photoelectric detector is a kind of optical detection equipment, which provides stable optical image. The system includes a visible light camera or visible light and infrared camera, which has the following functions: the movement of the insulting carrier makes the line of sight keep the stable angle in the inertial space, lock and observe the ground target , track the dynamic objects. If it’s combined with the corresponding positioning equipment, it also has the coordinate calculation function to target position. The system can be carried on the all kinds of vehicle transport platform,such as unmanned helicopter,fixed wing aircraft, vehicles for pipeline inspection, search and rescue, anti-smuggling, safety, environmental monitoring, forest fire prevention.
UP-13 series photoelectric detector also has the following characteristics:
- Using the two axis stable platform, small volume, light weight;
- With the low cost design, it can complete multiple tasks,such as the search and rescue, forest fire prevention, anti-smuggling task etc.
The highly integrated design and built-in control circuit;
Suitable for unmanned aerial vehicles, light aircraft and other airborne applications.
1. System Composition
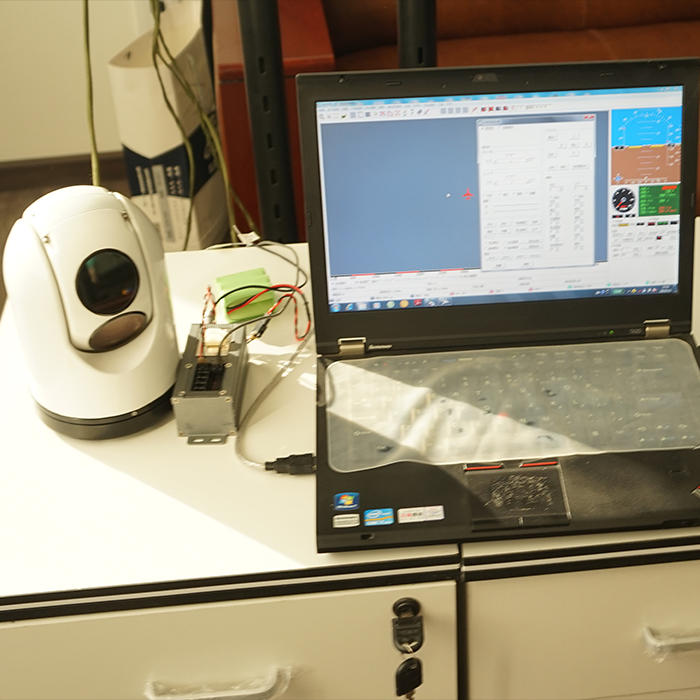
UP-13 series photoelectric detector is mainly composed of: structure components for the stable platform, thermal infrared imager, visible light camera,communication / servo control board.
The function of each part is briefed as follows:
- stabilized platform structure components: two axis structure, it can accommodate each optical detector and servo execution component, with the photoelectric detector connected as a whole. The stable platform structure components also include servo execution components, such as: gyro, angle sensor, motor, etc..
Infrared thermal imager: Using the infrared images,it can search and track the target. It has two medium and small view fields,which can be switched. The imager can output the infrared video signal outwards.According to the instruction,it can realize the adjustment functions of the switching, focusing, gain and brightness at the view field. You can also return to the current field of view angle outwards through the communication port.
The visible light camera: Used for continuous zooming color visible light camera to the target observation. The camera can output the visible light video signal. According to the instruction,it can achieve the functions of the zoom, focus control and so on. You can return to the current working field of view angle outwards through the communication port.
Communication / servo control panel: To complete the speed sampling and angular position sampling of the detector relative to inertial space motion; According to the control command, it runs the corresponding control algorithm to control and stabilize the platform, so as to achieve a variety of motions, including stable, follow-up and automatic tracking etc. At the same time, finish the forwarding of the command communication .
Video tracker: according to the images of the imaging system, to work out the deviation of the target relative to the optical axis, output the result of the deviation calculation to the communication / servo control board so as to control that the detector always keeps the line of sight pointing to the target. This function is also called gaze function.
2. Main Functions
UP-13 series photoelectric detector has the following main functions:
1) To provide infrared and visible light video images, search and monitor the ground, sea and aerial targets at day and night;
2) With the functions of steadily controlling the direction and pitching on the moving carrier;
3) Artificially operate the target line movement, lock the target and track the target automatically;
4) In accordance with a scheduled path, automatically search the designated area by the operator;
5) Maintenance operation: online zero position calibration, the cross curve adjustment of the optical axis, the drift correction and so on.
3.performance index
3.1 thermal imager
1) Type: uncooled focal plane (FPA) detector
2) Spectral Bandwidth: 8~12 m;
3) Pixels: 384 x 288;
4) Noise equivalent temperature difference (NETD): 50mk;
5) Field of View: 15.6º×11.7º (horizontal × vertical );
6) Operating Distance: the environment temperature 25℃, the relative humidity 80%, the visibility is more than 25Km
| Target | Target Size(m) | Detection Distance(Km) | Identification Distance(Km) |
| Person | 0.5×1.8 | 0.8 | 0.3 |
| Vehicle | 2.3×2.3 | 1.8 | 0.6 |
| Ordinary building | 10×10 | 6 | 2 |
3.2 Visible Light Camera

1) Working band: 0.4 ~ 0.9 m;
2) Type: 1/4 "color CCD
3) Pixels: 752 x 576;
4) Field of View:
4.6º×3.45º(horizontal × vertical);
46º×34.5º(horizontal × vertical);
5) Operating Distance: the target contrast is 30%, the visibility is more than 25Km
| Target | Target Size(m) | Detection Distance(Km) | Identification Distance(Km) |
| Person | 0.5×1.8 | 2 | 0.75 |
| Vehicle | 2.3×2.3 | 3 | 1.5 |
| Ordinary building | 10×10 | 12 | 5 |
3.3 Stable Platform
1) Two axis stabilized platform;
2) Working angle range: orientation +170°~-170, Pitch -90º~+90º
3) Tracking speed and acceleration:
The maximum angular velocity ≥90º/S;
The low steady angular velocity ≤0.01º/S;
The maximum angular acceleration ≥100º/S2;
4) stability accuracy:
The line of sight is of bidirectional stability, random error ≤0.02 º(1σ);
3.4 Video Tracker
1) Tracking Mode: correlation tracking / centroid tracking;
2) Adjustment range of the tracking box for the correlation tracking : 128 * 16 ~ 128 * 16;
3) Searching range of the correlation tracking: 64 * 64;
4) Output frequency of the deviation data : 50Hz;
5) Output accuracy of the deviation data : 1 pixels;
3.5 Communication Interface
1) RS-422 data communication interface;
3.6 System Power Supply
1) Direct current 9V ~16V;
2) Power consumption: constant value≤20W, the peak value ≤80W.
3.7 Physical Data
1) Weight of the Photoelectric Detector : ≤1.5kg
2) Weight of the Video Tracking Electronic Box: ≤0.3kg。
3.8 Environmental Conditions
1) Working Temperature: -20 ~ +65;
2) Working Humidity: relative humidity 5%-95%, non condensing.


Configuration parameters